Pipe Viper
Compact pipe inspection robot designed for confined-space navigation, camera-based inspection, and reliable electrical integration.
Project Overview
Pipe Viper is a compact inspection robot designed to operate in confined environments where direct human inspection is difficult, unsafe, or impractical. The system was developed to support visual inspection through a camera-equipped robotic platform that could fit into tight spaces and provide useful feedback from inside a pipe or constrained area.
My role on this project was Lead Electrical Engineer. I focused on electrical planning, subsystem integration, camera support, power routing, and making sure the robot’s internal hardware could function reliably inside a physically limited design.
The project required balancing robotics, electrical layout, mechanical constraints, and inspection functionality into a compact system that could support real-world use.
Project Specs
My work centered on making the electrical and camera systems fit within the robot’s physical constraints while supporting reliable operation, clean subsystem routing, and practical inspection use.
Engineering Challenges
The main engineering challenge was fitting functional electrical hardware into a compact robotic platform without interfering with movement, camera placement, or mechanical assembly. Because the robot was intended for confined inspection environments, space was limited and every component had to be placed intentionally.
Another challenge was maintaining reliability in a system that could experience vibration, movement, and tight clearances. Electrical connections needed to be secure, organized, and positioned in a way that reduced the chance of failure during operation.
- Integrating camera hardware into a compact inspection platform
- Routing electrical connections within limited internal space
- Maintaining reliable power and signal connections during movement
- Balancing electrical layout with mechanical constraints
- Supporting visibility and inspection capability through stable camera placement
- Reducing wiring clutter to improve reliability and serviceability
System Design
Pipe Viper was designed as a compact robotic inspection system with an emphasis on camera visibility, electrical reliability, and constrained-space operation. The electrical system needed to support the robot’s core inspection hardware while staying protected and organized inside the robot body.
The camera system was one of the most important parts of the design because the robot’s main purpose was visual inspection. Camera placement had to provide a useful viewing angle while still fitting within the robot’s compact shape.
The electrical layout was planned around keeping wiring secure, minimizing interference with moving parts, and supporting the overall system architecture.
- Compact robot body designed for confined inspection environments
- Camera-based visual feedback for internal inspection
- Electrical subsystem routing planned around limited space
- Power and signal connections organized for reliability
- Hardware integration coordinated with mechanical design constraints
- System layout built around practical inspection use
Testing & Iteration
Testing focused on confirming that the robot could support its inspection purpose through physical construction, electrical integration, and camera positioning. The build process required checking that components fit properly, wiring remained secure, and the robot could support the intended inspection layout.
Because the system had limited internal space, iteration was especially important. Component placement, wiring paths, and camera position all affected how well the robot could function as a complete inspection platform.
- Checked physical component fit inside the compact robot layout
- Verified electrical routing and connection stability
- Evaluated camera placement for inspection visibility
- Adjusted hardware organization to reduce interference and clutter
- Supported team testing by troubleshooting electrical and integration issues
Results & Findings
Pipe Viper demonstrated the design and integration of a compact robotic inspection platform with camera-based functionality. The project showed how electrical engineering decisions directly affect the performance, reliability, and usability of a robotics system.
The strongest finding from the project was the importance of planning electrical systems around mechanical constraints early in the design process. In compact robotics, wire routing, camera placement, power connections, and component access can make the difference between a clean system and one that is difficult to build or maintain.
This project is one of my strongest examples of electrical integration work because it required practical decision-making, subsystem coordination, and hardware organization in a real robotics build.
Future Improvements
Future versions of Pipe Viper could improve inspection performance, durability, and operator feedback by adding more advanced sensing and a cleaner electrical architecture.
- Add stronger strain relief for wiring exposed to movement or vibration
- Improve the internal wiring harness for easier maintenance
- Add LED lighting near the camera for better visibility inside dark spaces
- Improve camera mounting for more stable visual feedback
- Add environmental protection for dust, debris, or moisture
- Explore modular electronics mounts for faster repair and upgrades
- Add onboard sensor feedback for distance, tilt, or obstacle detection
Technologies Used
Project Links
GitHub Repository: View Source Code
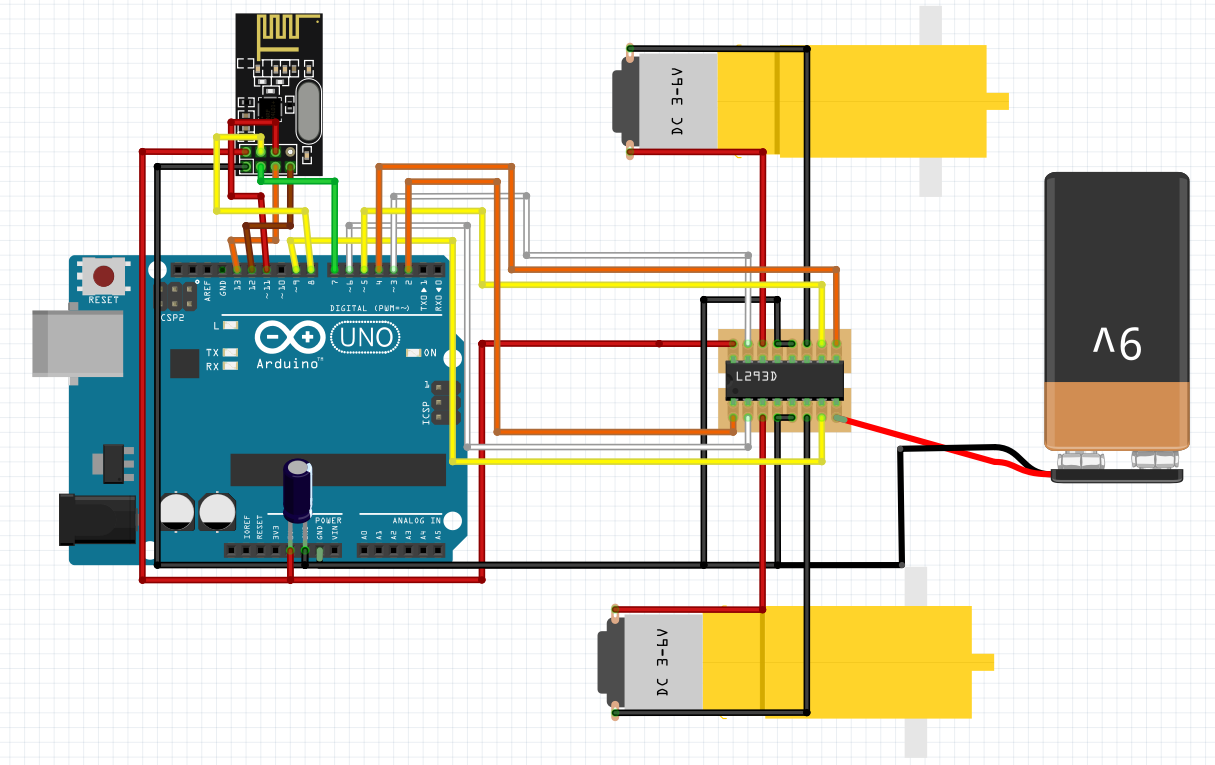
Demo Evidence: The project image above documents the physical robot platform and shows the completed inspection robot build. The system focused on camera-based inspection, compact electrical integration, and reliable hardware organization within a constrained robotic design.
Key Contributions
- Served as Lead Electrical Engineer for the project
- Planned and supported the robot’s electrical system layout
- Integrated camera and power systems into a compact robot body
- Worked around tight mechanical constraints during system integration
- Helped ensure wiring reliability and clean hardware organization
- Supported troubleshooting and prototype refinement during development