Harvest Hawk
Agricultural robotics and embedded sensing platform designed for environmental monitoring, sensor integration, and field data collection.

Project Overview
Harvest Hawk is an agricultural robotics and embedded systems project developed to monitor environmental conditions using integrated sensor hardware and controller-based data collection. The system was designed to collect field-relevant data such as temperature, humidity, barometric pressure, and light intensity.
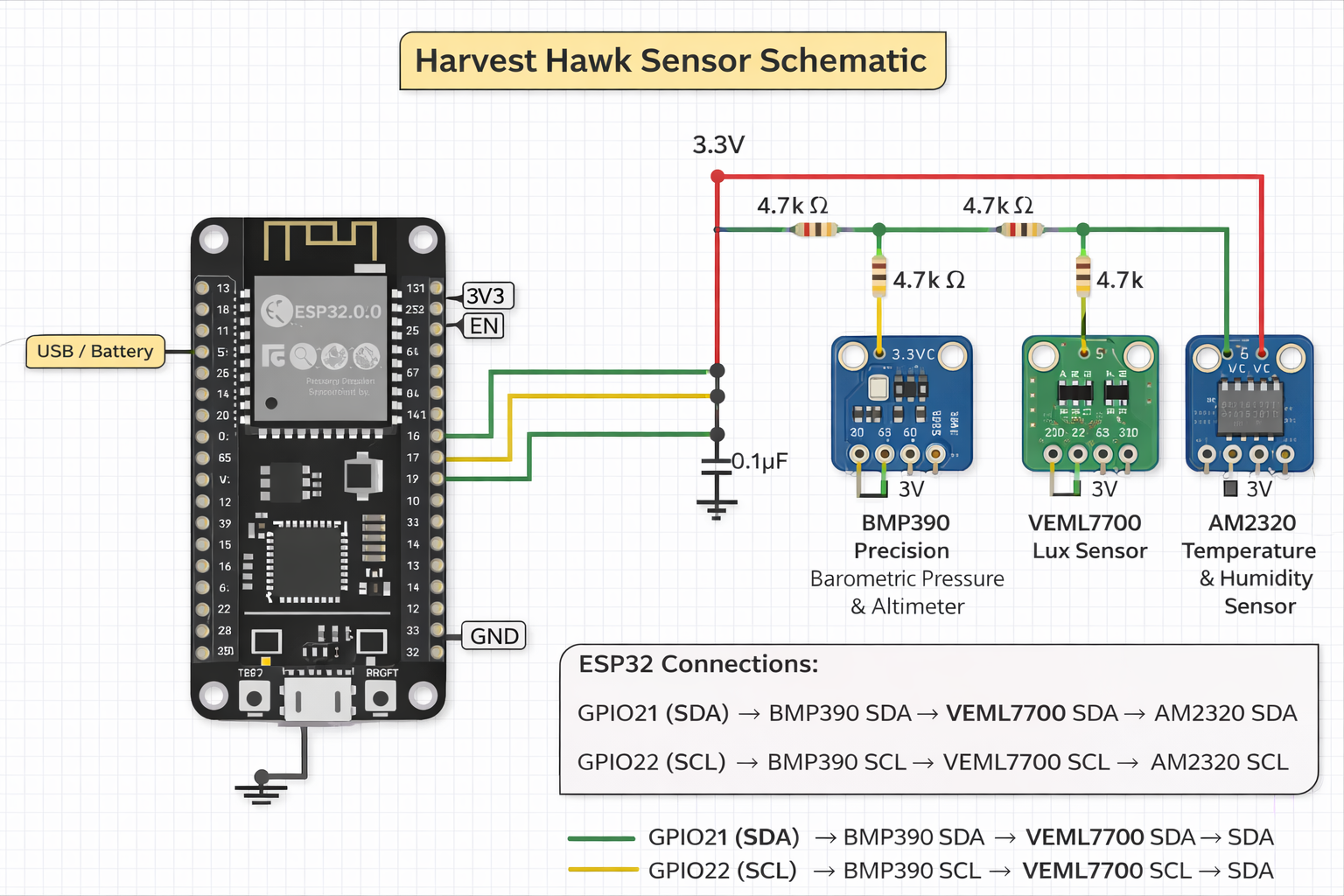
The project used an ESP32 as the main controller and connected multiple environmental sensors across a shared I2C communication bus. The system included sensors such as the BMP390, VEML7700, and AM2320 to support environmental awareness in agricultural settings.
The goal of Harvest Hawk was to demonstrate how embedded sensing, robotics planning, and environmental data collection can support smarter agricultural monitoring systems.
Project Specs
My work on Harvest Hawk focused on system planning, embedded hardware direction, sensor integration strategy, CAD and electrical support, and guiding the project toward a working environmental monitoring concept.
Engineering Challenges
One of the main challenges was building a sensor system that could collect multiple types of environmental data through a clean and manageable hardware layout. Since multiple sensors were connected through I2C, the design needed to account for shared communication lines, correct wiring, and reliable controller communication.
Another challenge was organizing the project as a full system instead of treating each sensor as a separate part. The controller, sensors, data output, schematic, and physical robotics concept all needed to work together as one embedded monitoring platform.
- Integrating multiple environmental sensors with one ESP32 controller
- Managing shared I2C communication across SDA and SCL lines
- Planning a clean hardware layout for sensor-based data collection
- Turning raw sensor readings into useful environmental information
- Documenting the system clearly through images, schematics, and output data
System Design
Harvest Hawk was designed around an ESP32 microcontroller that manages multiple environmental sensors using I2C communication. The shared bus allowed the system to connect multiple sensor modules while keeping the wiring layout cleaner and more efficient than using separate communication paths for every sensor.
The sensor setup was planned to monitor field conditions that could affect agriculture, including pressure, humidity, temperature, and light exposure. This type of data can help support decisions related to crop monitoring, environmental awareness, and future automation features.
The schematic documents the ESP32-based wiring layout, including the shared I2C bus using GPIO21 for SDA and GPIO22 for SCL.
- ESP32 used as the main embedded controller
- BMP390 used for barometric pressure and altitude-related sensing
- VEML7700 used for ambient light measurement
- AM2320 used for temperature and humidity monitoring
- I2C communication used to simplify multi-sensor integration
- Sensor output used to validate environmental data collection
Testing & Iteration
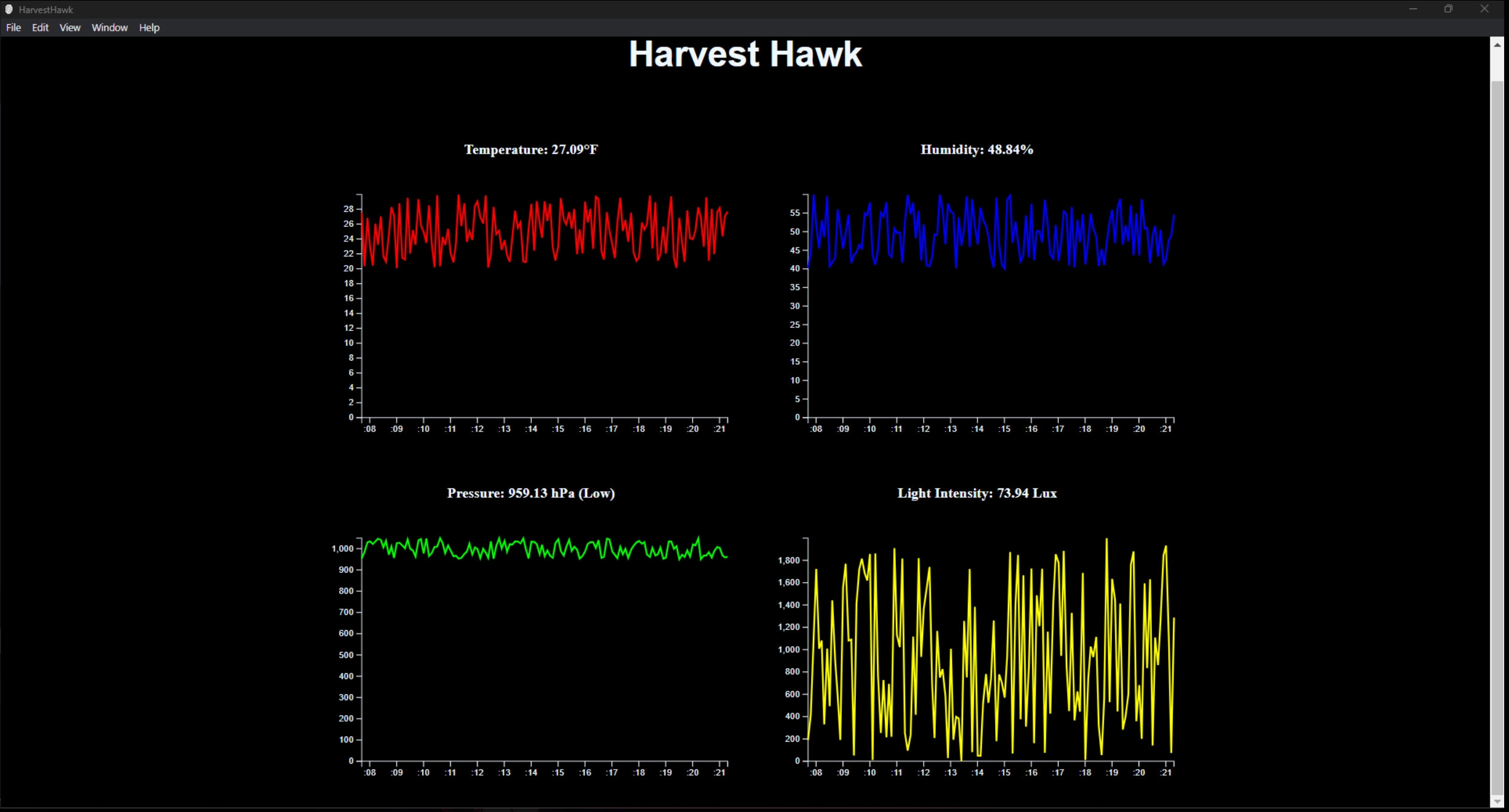
Testing focused on confirming that the embedded sensor system could produce readable environmental data. The data output image documents real sensor readings from the system and serves as evidence that the controller and sensor setup were able to communicate successfully.
During development, the project required iteration around wiring organization, sensor selection, data visibility, and system documentation. The goal was not only to connect the sensors, but to present the data in a way that proved the system was functioning and useful.
- Verified environmental sensor readings through output data
- Confirmed the shared I2C sensor layout with the ESP32
- Used schematic documentation to clarify the hardware design
- Improved project evidence by showing both system wiring and sensor output
- Evaluated how the system could support future agricultural robotics features
Results & Findings
Harvest Hawk successfully demonstrated a working embedded sensing concept for agricultural monitoring. The project showed that an ESP32-based system could collect and display multiple environmental readings using a compact sensor layout.
The project also reinforced the importance of system-level design in robotics and embedded systems. Sensor hardware, controller selection, wiring, data output, and documentation all had to work together to create a complete technical demonstration.
The final result was a strong portfolio project that connects embedded systems with a real-world use case in agriculture, environmental monitoring, and robotics-based field awareness.
Future Improvements
Future versions of Harvest Hawk could expand the system from environmental monitoring into a more complete autonomous agricultural platform.
- Add wireless data logging to store readings over time
- Create a web dashboard for live environmental monitoring
- Add battery power management for outdoor field operation
- Integrate GPS for location-tagged sensor readings
- Add soil moisture sensing for more complete agricultural data
- Connect the sensor platform to mobile robotics navigation features
Technologies Used
Project Links
GitHub Repository: View Source Code
Demo Evidence: The environmental data output image above shows live readings produced by the system, while the schematic documents the ESP32-based sensor layout and shared I2C wiring.
Key Contributions
- Led the overall project direction and system concept development
- Helped define the embedded architecture and environmental sensing approach
- Worked with ESP32-based multi-sensor integration
- Supported CAD, electrical planning, and hardware documentation
- Contributed to data collection planning for agricultural monitoring
- Helped organize the project into a complete robotics and embedded systems demonstration